
Congratulations to Shaojun Zhu and David Surovik for the paper:
“Efficient Model Identification for Tensegrity Locomotion”
by Shaojun Zhu, David Surovik, Kostas Bekris and Abdeslam Boularias
which has been accepted to appear at the upcoming IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2018, taking place this coming October in Madrid, Spain.
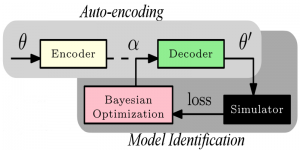
This is a collaborative effort with Prof. Abdeslam Boularias, with whom we are collaborating on system identification using Bayesian Optimization tools. This paper projects the model identification challenge for the spherical tensegrity rover of NASA Ames into an appropriate lower dimensional space for efficiency. This space is automatically discovered through a Variational Auto Encoder.
IROS 2018 website: https://www.iros2018.org/